
Reprojetando um CLP clone para uso com Arduino
É bastante comum encontrar em páginas de compras online, publicidades como esta: “Placa de controle industrial compatível com FX1N, FX2N, FX3U e programável com software GX”. O preço é atraente, no entanto, a documentação é inexistente e não há menção de como programá-la com outras ferramentas, como Arduino em sistemas operacionais diferentes do Windows. Este artigo introduzirá alguns conceitos-chave para ajudar a resolver este problema.
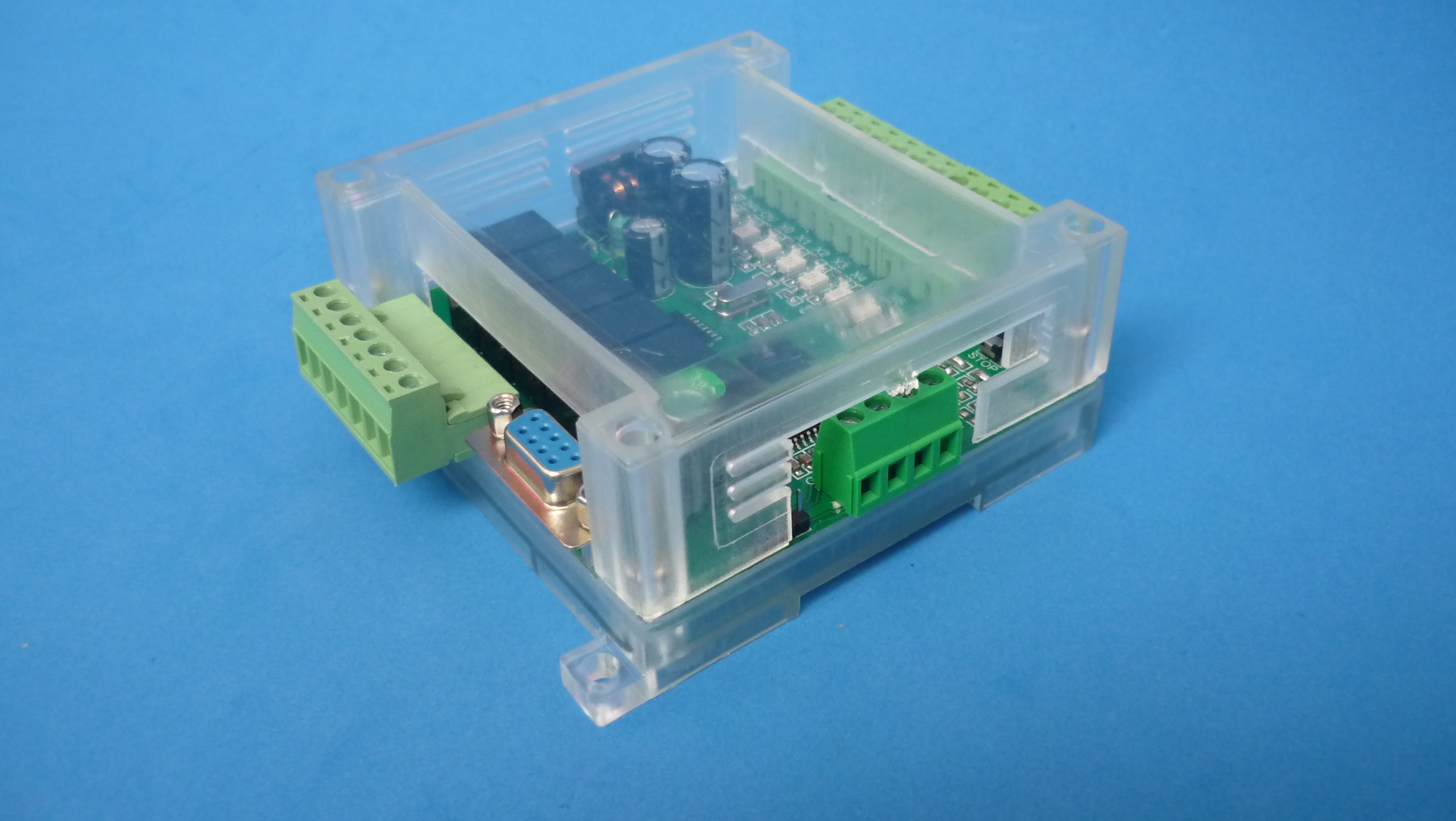
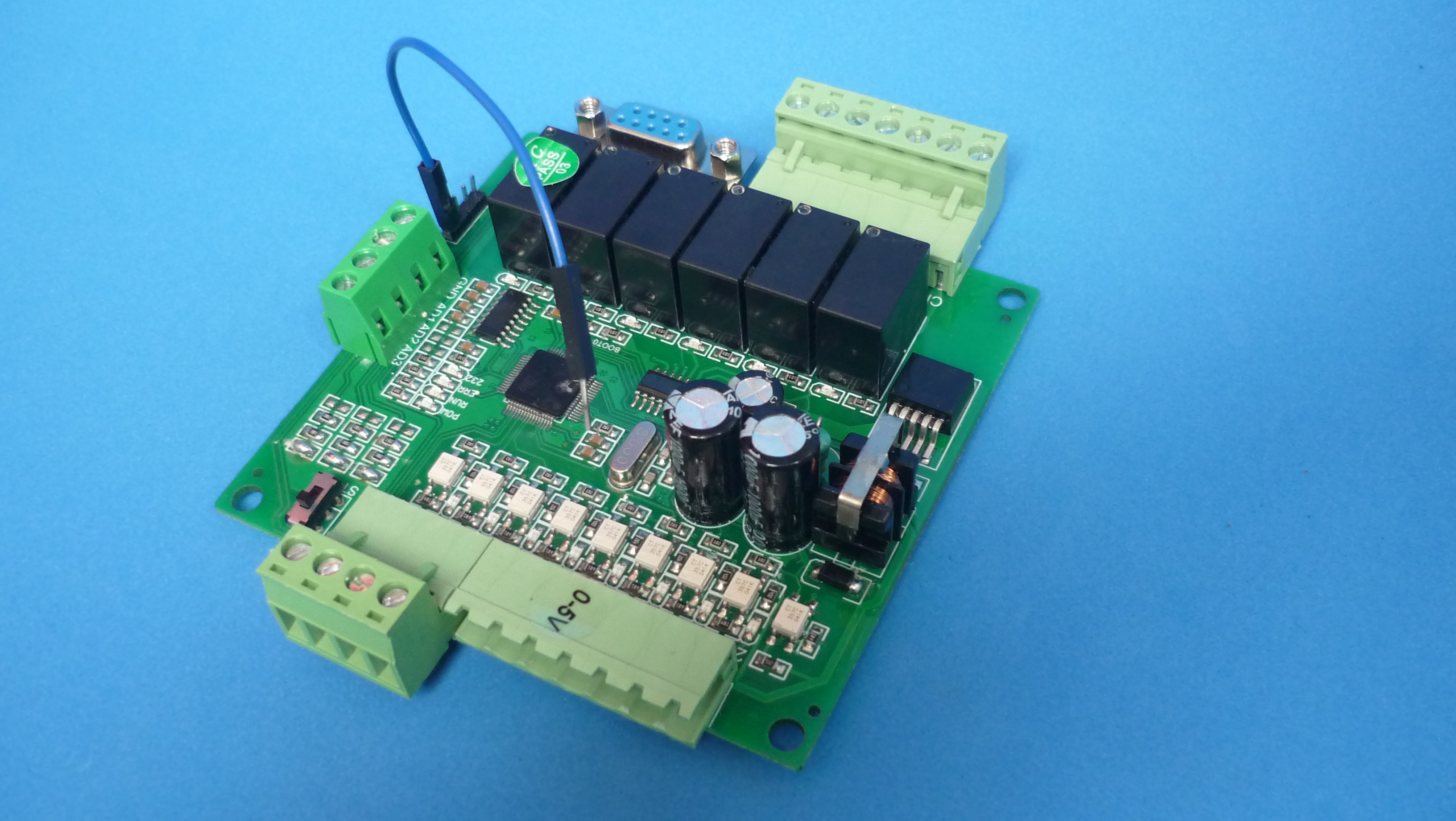
Componente chave: Placa de controle industrial compatível com FX1N.
Ataque dos clones.
Essas placas mencionam a compatibilidade com o software GX, que é fabricado por uma empresa Japonesa que faz CLP e também carros. À primeira vista, a compatibilidade não é oficial, pois não há marca registrada impressa. Sua origem é desconhecida, talvez sejam cópias simplificadas baseadas em esquemas originais e código fonte, ou de alguma forma o formato binário nativo do CLP foi feito engenharia reversa e um interpretador tenha sido construído e execute no microcontrolador traduzindo o código. A maioria das placas é baseada em microcontroladores STM32 e, de acordo com alguns artigos e vídeos, o software de programação original realmente os reconhece como um CLP original!
Devido ao seu baixo custo (cerca de $25 USD), e por suas saídas de relé isoladas, entradas optocamente isoladas, porta serial RS232 e fonte de alimentação regulada, são ótimos candidatos para projetos pequenos desde que possam ser programados com uma ferramenta multi-plataforma gratuita como o Arduino ou o conjunto STM. Além disso, é necessário um diagrama esquemático para descobrir qual I/O do microcontrolador vai para qual periférico na placa!
Lista de materiais.

| Componente | Ligação do compra | Folha de dados |
|---|---|---|
| Placa de controle industrial compatível com FX1N | Compre aqui | industrial-control-board-fx1n.pdf |
| Fonte de alimentação montada em trilho DIN de 24 V 15 W. | Compre aqui | 24v-din-rail-power-supply.pdf |
| Conversor USB para RS232. | Compre aqui | usb-rs232-converter.pdf |
| Conector de terminal sem solda DB9. | Compre aqui | db9-solderless-terminal-connector.pdf |
| Fio tipo PVDF UL1423 de 30 AWG. | Compre aqui | UL1423.pdf |
| Cabos de ligação Dupont jumper | Compre aqui | dupont-jumper-cables.pdf |
| Conector Berg masculino de linha única de 2,54 mm. | Compre aqui | FHA3-S1XX.pdf |
| Pinagem para placas de controle industrial | repositório |
|---|---|
| Placas de controle industrial baseadas no STM32 | stm32-industrial-control-boards |
| Componente opcional | Ligação do compra | Folha de dados. |
|---|---|---|
| Lupa dupla olho para jóias | Compre aqui | magnifying-double-eye.pdf |
| Câmera de microscópio digital USB | Compre aqui | microscope-camera-digital-usb.pdf |
| Multímetro digital alimentado por baterias AA. | Compre aqui | digital-multimeter-powered-aa-batteries-ut139c.pdf |
Reprogramação
O mencionado placa, possui um microcontrolador STM32F103, então, instintivamente, deve-se procurar por uma trilha para um cabeçalho de programação SWD.
Depois de seguir as trilhas desse cabeçalho, um pino foi encontrado conectado a 3,3 V, outro a GND, mas os outros dois pinos não estavam conectados aos pinos SWD no microcontrolador, mas sim aos pinos PC10 e PC11. Começando a pesquisa a partir do microcontrolador, não há trilhas dos pinos SWD ou USB, então a única alternativa disponível para reprogramação é através do UART1 usando o bootloader armazenado na ROM.
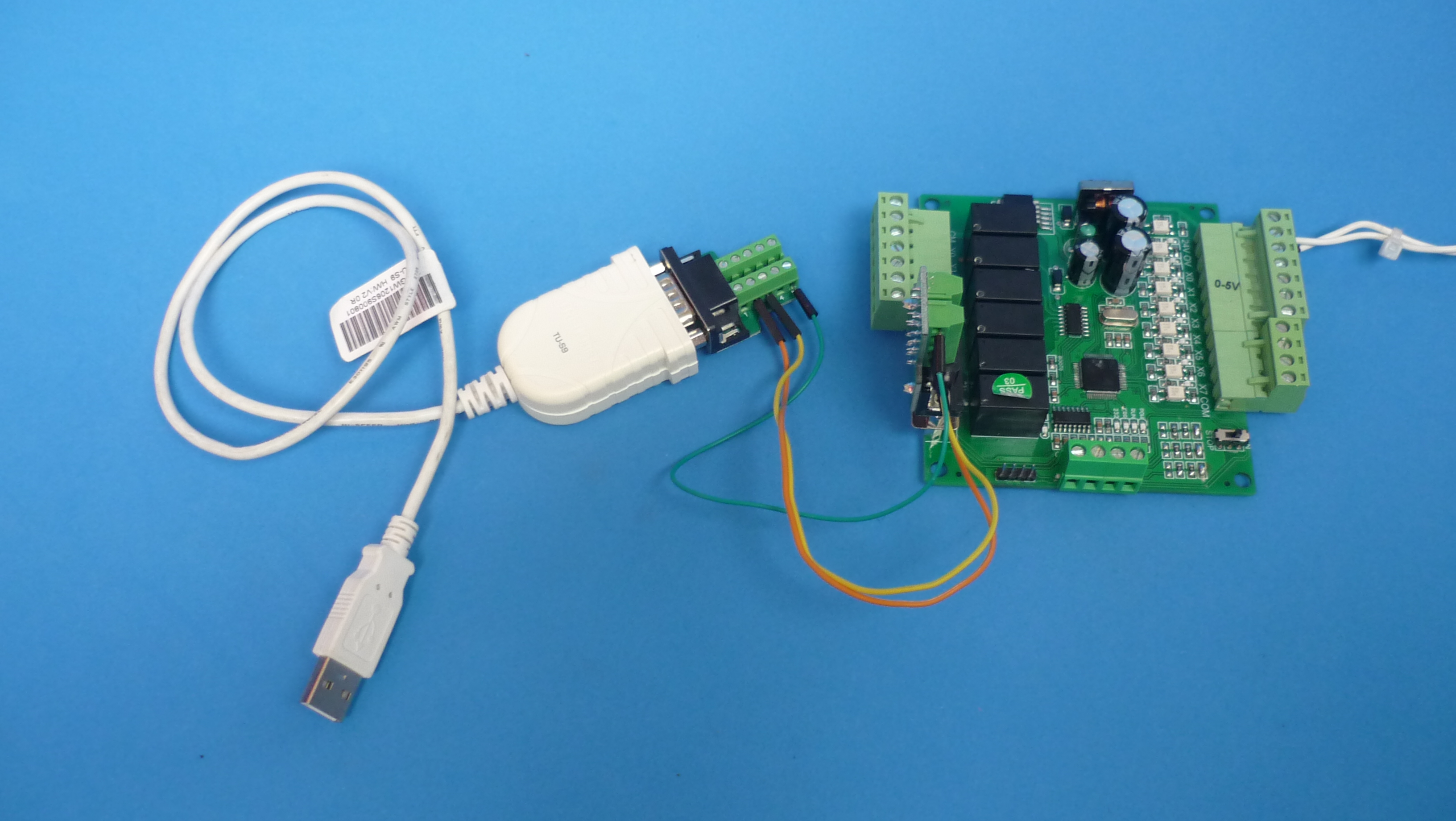
Seguindo as trilhas saindo do conector DB9, elas terminam em um chip sem marcação, no entanto, devido aos capacitores próximos, provavelmente é um MAX232 ou equivalente. Seguindo as trilhas saindo deste chip, elas terminam nos pinos PA9 e PA10 do microcontrolador, que são os pinos UART1.
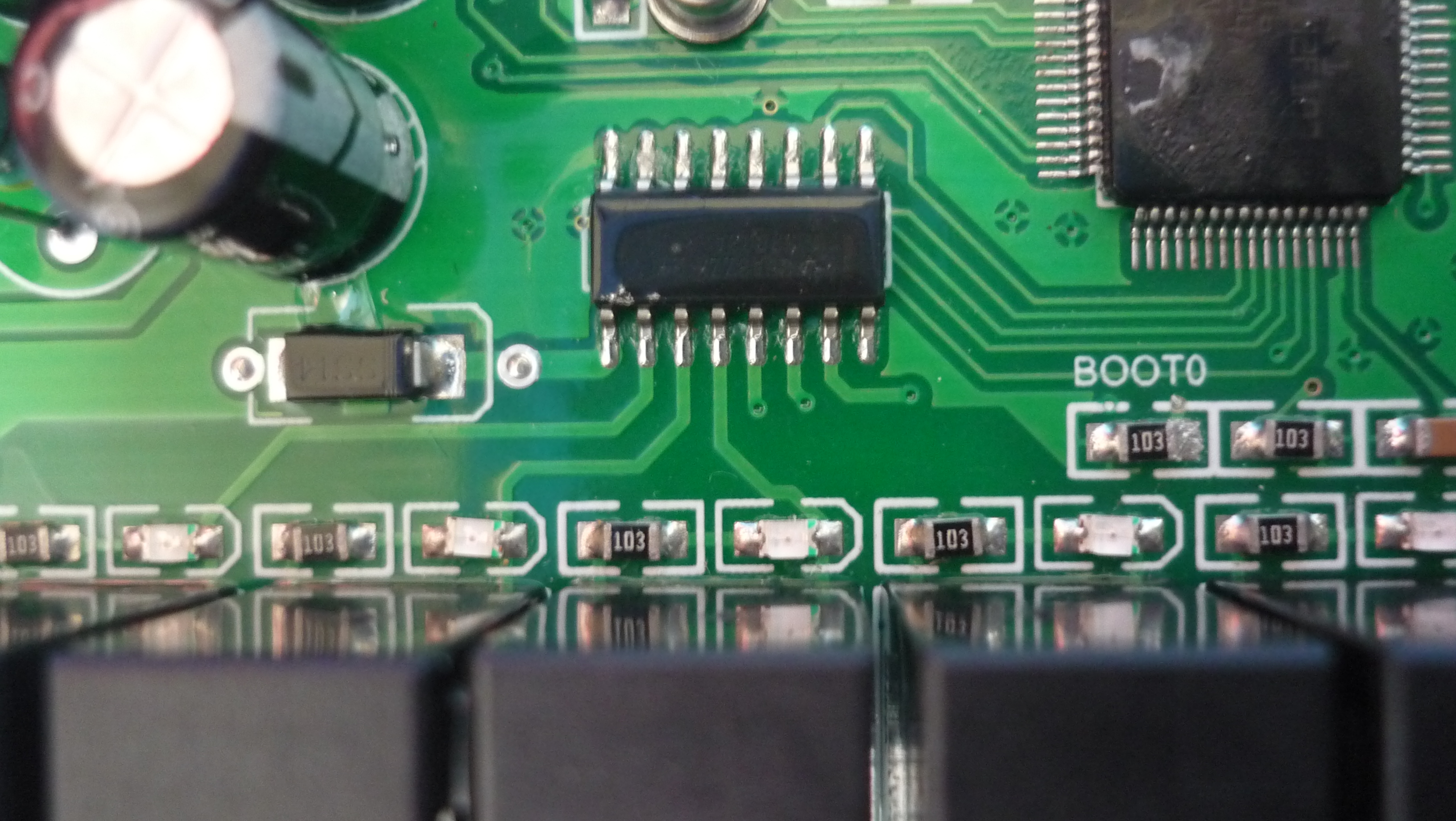
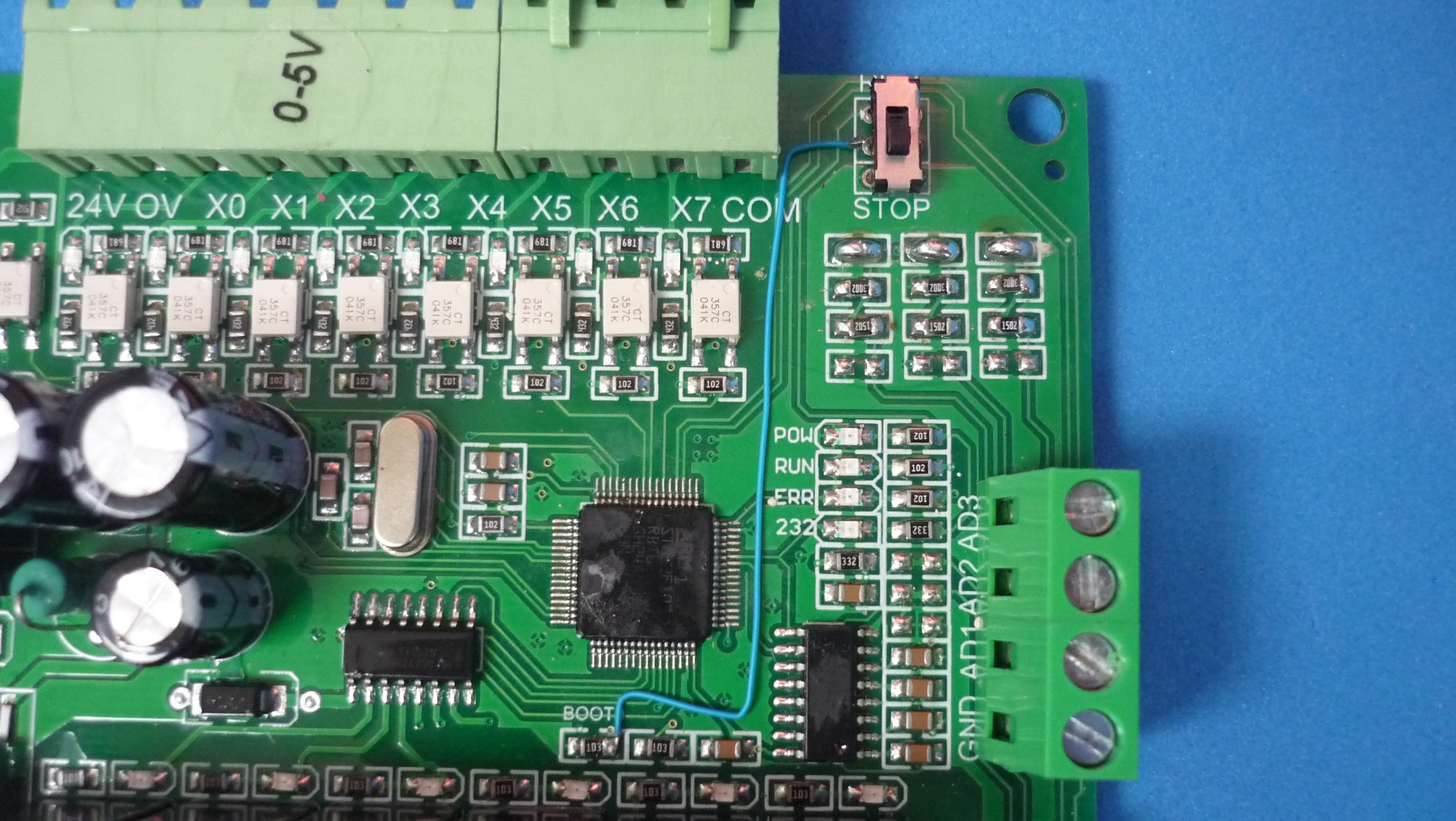
Felizmente, nesta placa, o resistor conectado ao pino BOOT0 está claramente marcado na tela de seda. Para iniciar no modo de inicialização, um cpnector foi soldado no pad de 3,3 V e, usando um jumper cabo Dupont, uma conexão temporária entre BOOT0 e 3,3 V é feita enquanto a placa é alimentada.
Uma vez que o bootloader estava em execução, o STM32CubeProg foi iniciado e a comunicação com o microcontrolador foi verificada. O chip estava no modo de proteção de leitura, então não havia maneira de fazer backup do firmware para reverter a placa para o seu estado original. Toda a memória FLASH foi apagada.
Usando o Arduino IDE, procedeu-se à instalação do STM32duino core e à criação de uma pequena aplicação de teste que envia dados através da porta serial para o PC. O aplicativo foi baixado e os dados de entrada foram verificados. Agora a aventura começa!
Identificando os pinos de E/S
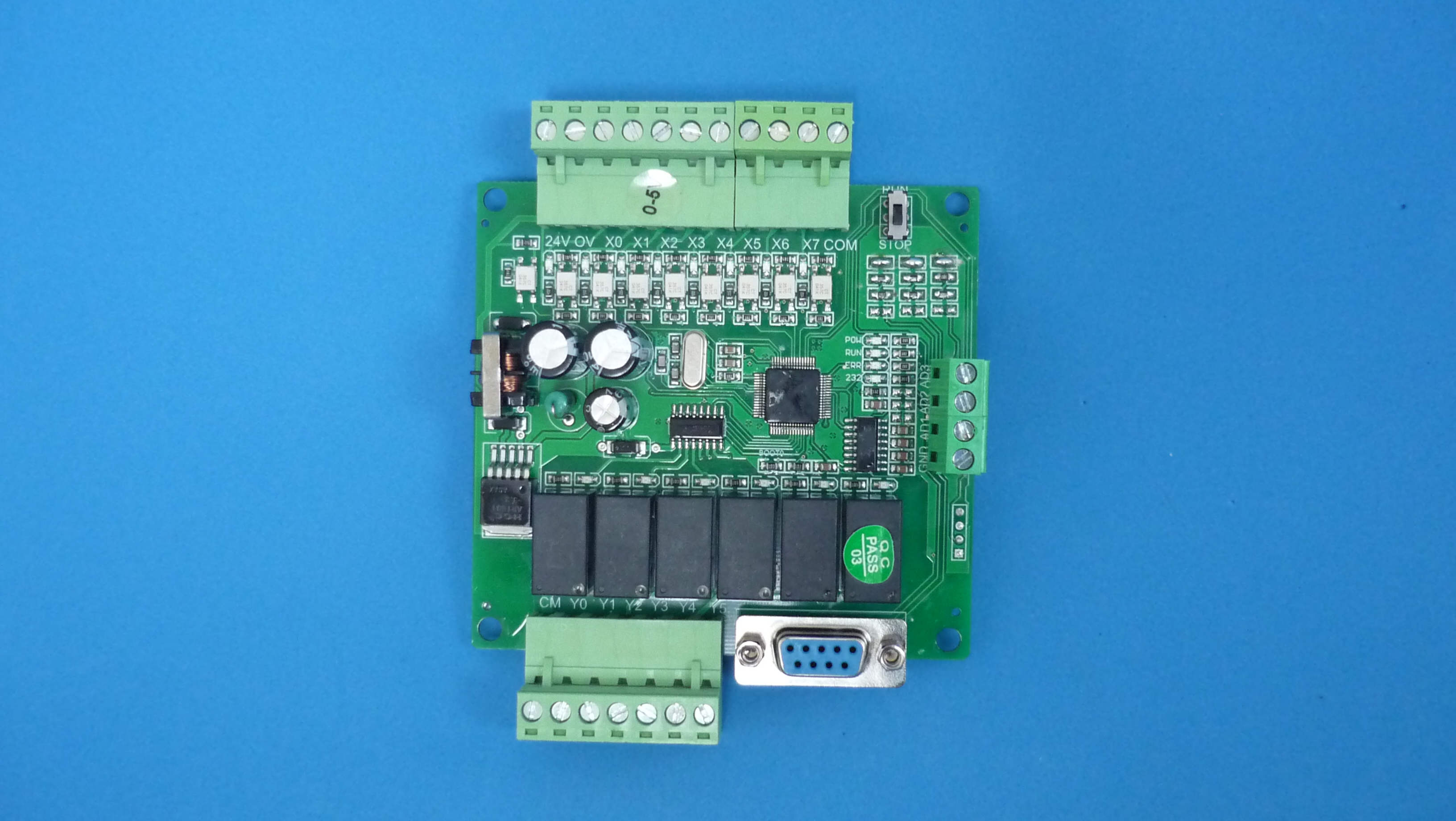
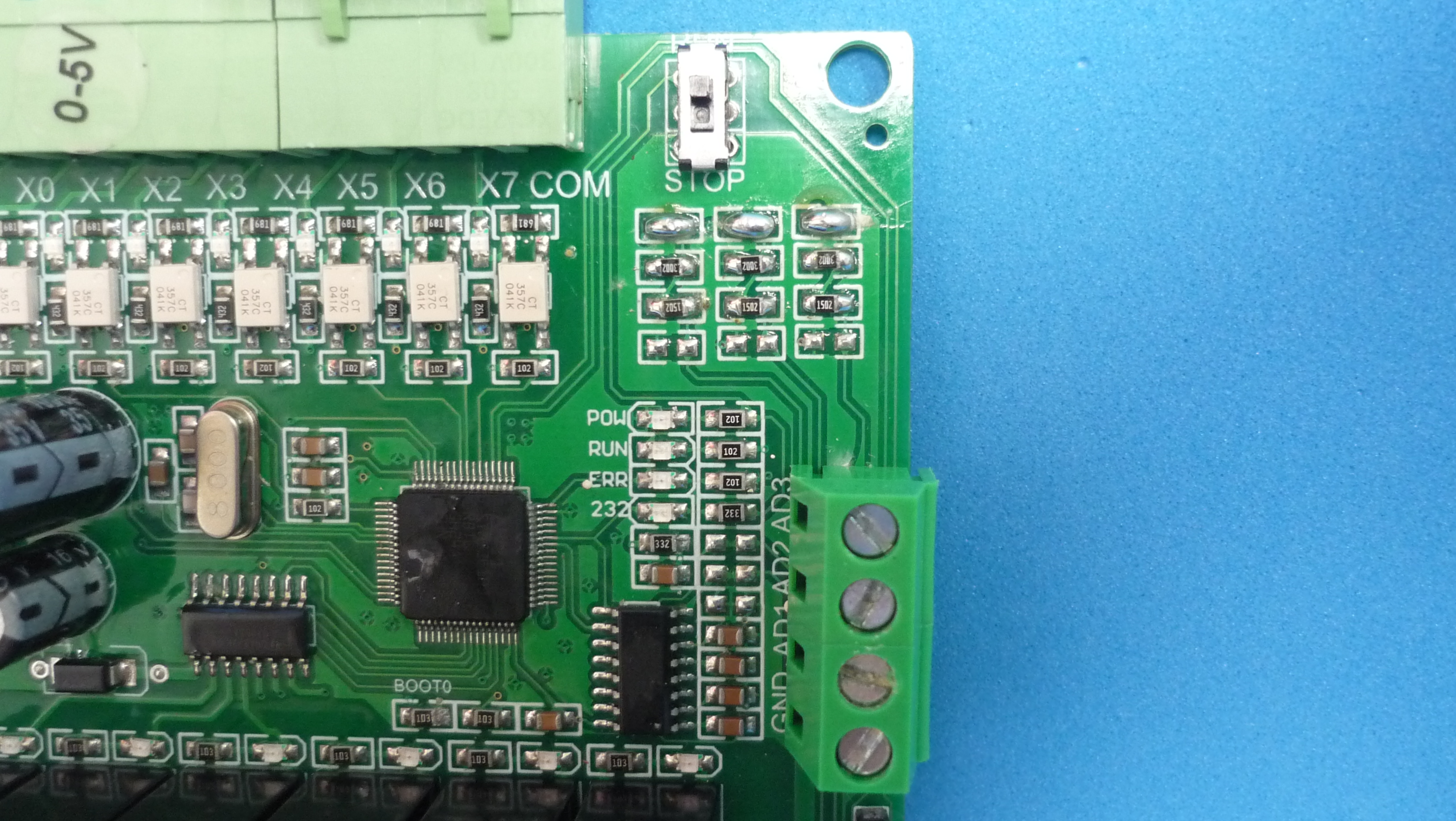
Devido à falta de um diagrama esquemático ou marcas na tela de seda mostrando quais pinos de E/S do microcontrolador vão para qual periférico, esse trabalho deve ser feito manualmente, com muita paciência para seguir as trilhas. Felizmente, a placa tem apenas 2 camadas, então é possível começar apenas com uma lupa de duplo olho para jóias e um multímetro.
LED e interruptor
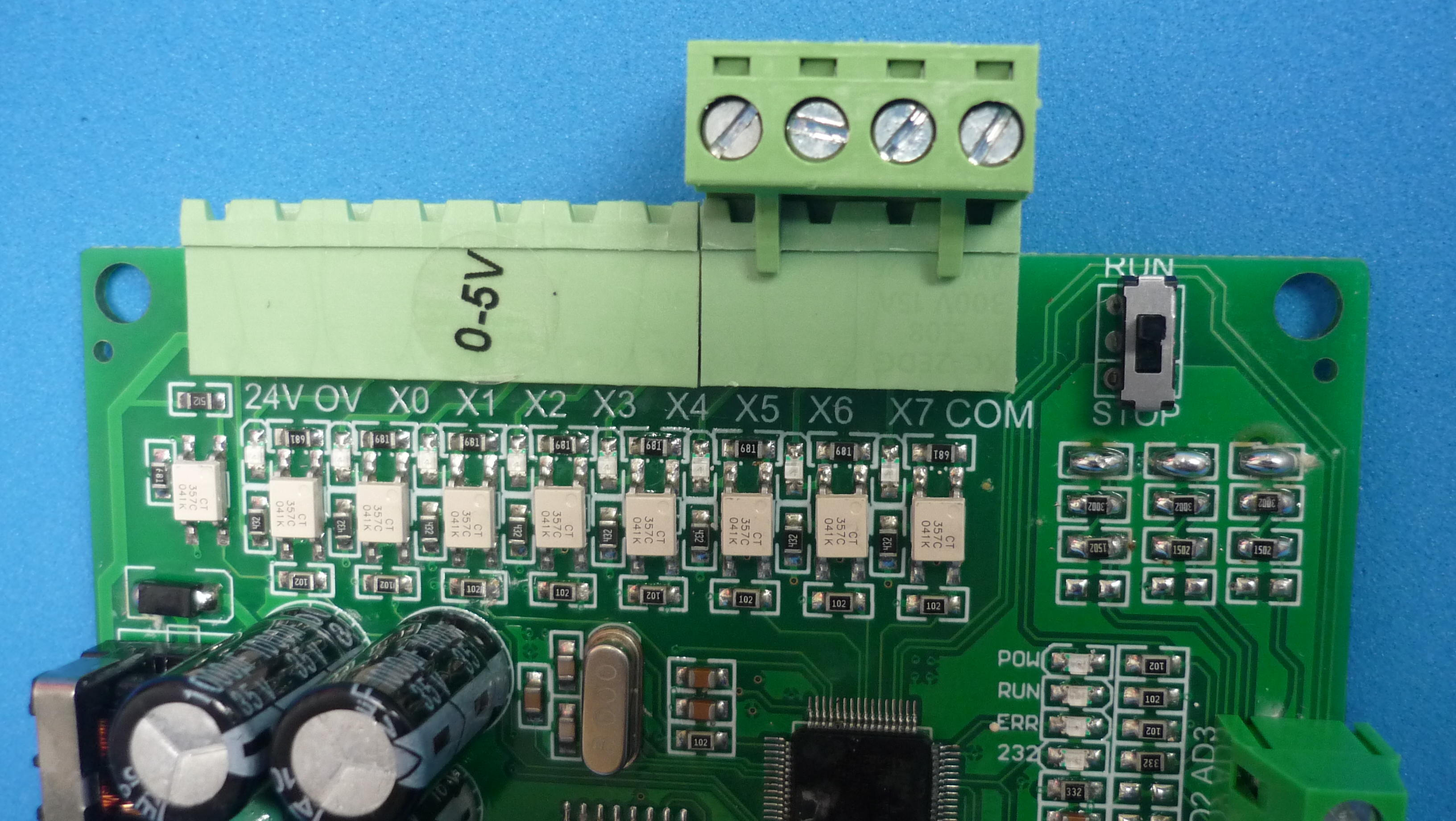
A placa tem dois indicadores LED, um rotulado como RUN e o outro rotulado como ERR. Além disso, há um interruptor que era usado pelo antigo firmware PLC para interromper a execução do programa. Devido a esses periféricos terem alguns elementos entre eles e o microcontrolador, eles são muito fáceis de começar.
Os pinos foram encontrados mapeados da seguinte maneira:
| ELEMENTO | PIN |
|---|---|
| LED RUN | PB12 |
| LED ERR | PB13 |
| RUN/STOP SWITCH | PC9 |
Entradas digitais
As entradas digitais foram relativamente fáceis de encontrar, porque as trilhas que saem dos optocopladores vão diretamente para o microcontrolador. Apenas algumas delas eram difíceis porque saltavam para a camada oposta ou viajavam por baixo de um componente grande.

Os pinos foram encontrados mapeados da seguinte maneira:
| ELEMENTO | PIN |
|---|---|
| X0 | PA0 |
| X1 | PA1 |
| X2 | PB9 |
| X3 | PA6 |
| X4 | PA7 |
| X5 | PB5 |
| X6 | PB4 |
| X7 | PD2 |
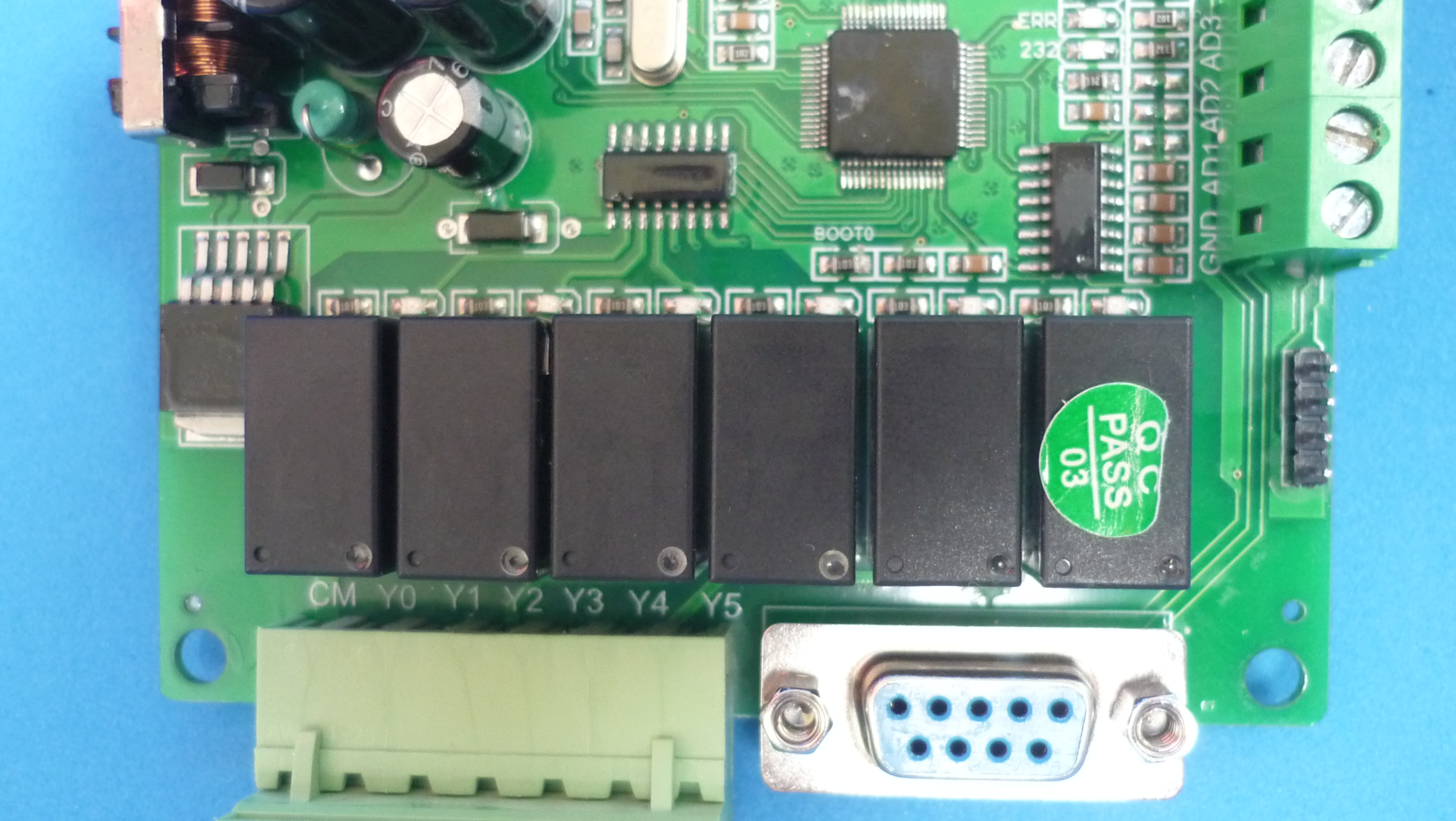
Saídas digitais
As saídas digitais exigiram mais esforço, porque as trilhas foram primeiro para um chip UL2003 e, a partir daí, para cada relé, viajando sob componentes ou saltando para a camada oposta. O multímetro foi crucial para seguir as trilhas.
Os pinos foram encontrados mapeados da seguinte maneira:
| ELEMENTO | PIN |
|---|---|
| Y0 | PB8 |
| Y1 | PB1 |
| Y2 | PB10 |
| Y3 | PB0 |
| Y4 | PC5 |
| Y5 | PC4 |
Entradas analógicas
As entradas analógicas foram relativamente fáceis de encontrar, porque são apenas 3 e estão conectadas apenas a um divisor de resistência de tensão (15 K / 30 K) entre elas e o microcontrolador.
Os pinos foram encontrados mapeados da seguinte maneira:
| ELEMENT | PIN |
|---|---|
| AD1 | PC1 |
| AD2 | PC2 |
| AD3 | PC0 |
Toques finais
Neste ponto, todos os periféricos estão mapeados nos pinos de E/S do microcontrolador, no entanto, sempre que a placa precisar ser reprogramada, o BOOT0 precisará ser definido para 3,3 V usando um jumper de cabo temporal, o que implica abrir a caixa. Uma solução rápida será conectar um cabo do pino BOOT0 ao interruptor RUN / STOP usado pelo antigo firmware PLC, dessa forma, o bootloader ROM poderia ser iniciado externamente sem abrir o caso para reprogramação.
Em resumo
nesta etapa, você tem uma placa de baixo custo com periféricos suficientes para pequenos experimentos sem precisar de hardware adicional e pode ser programada usando o Arduino IDE ou o conjunto STM. Para replicar este experimento com uma placa diferente (desde que o CPU tenha sido identificado), siga os seguintes passos:
-
Procure o pinos SWD na PCB (4 pads) e siga os trilhos até o microcontrolador para garantir que os pinos sejam os corretos.
-
Se o passo anterior falhar, siga os trilhos dos pinos UART1 do microcontrolador e adicione o hardware adicional (conversor de nível, conectores) para a comunicação com o PC
-
Procure o pino BOOT0, geralmente está conectado ao chão através de um resistor, que servirá como um “ponto de teste”.
-
Usando o STM32CubeProg, apague a memória FLASH do microcontrolador. Se o UART1 foi usado como meio de conexão, o bootloader ROM deve ser iniciado, configurando o BOOT0 para 3,3 V enquanto liga a placa.
-
Usando o Arduino IDE ou o STM suite, faça uma pequena aplicação de teste, que envia caracteres para a porta serial, para saber se a placa pode ser programada.
-
Siga os trilhos dos periféricos até o microcontrolador, para mapear os pinos de E/S.
-
Faça uma conexão de cabo do BOOT0 para o interruptor RUN/STOP para programar facilmente a placa.
Melhorias possíveis:
Crie uma aplicação esqueleto como ponto de partida para cada programa para a placa, essa aplicação deve ter algum tipo de mecanismo que verifica a condição do interruptor RUN/STOP para decidir se vai para o bootloader ROM ou começar a executar o programa armazenado na FLASH, Isso elimina a necessidade de uma conexão elétrica entre BOOT0 e o interruptor.
Outra opção, se uma aplicação esqueleto não for desejada, é criar um bootloader armazenado na FLASH que usa o UART1 para comunicação, similar ao armazenado na ROM, mas esse verifica a condição do interruptor RUN/STOP para decidir se baixa um novo programa ou executa o programa armazenado na FLASH.

